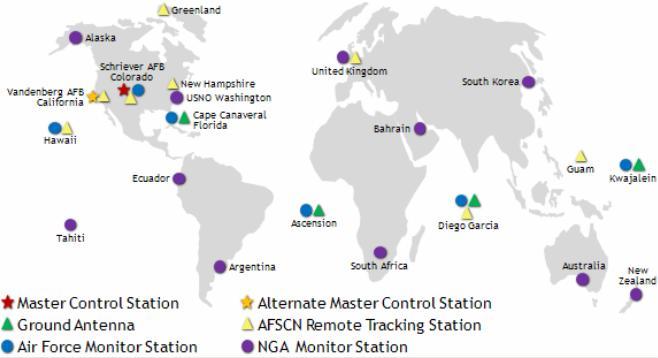
El origen de WGS 84, como el GPS vinculado al sector militar estadounidense, se remonta al año 1987 y se basó en observaciones Doppler del Sistema de Navegación por Satélite de la Marina de Estados Unidos conocido bajo el nombre de Transit, que proveía coordenadas con exactitudes a escala global a nivel de 1 metro. Más allá de la popularidad de WGS 84, es importante saber que este marco nunca dispuso de una red de puntos materializados sobre la superficie terrestre, en el sentido de conformar una infraestructura de posicionamiento accesible a los usuarios. En realidad, su realización estuvo acotada a unos pocos sitios utilizados por la National Geospatial-Intelligence Agency (ex National Imagery and Mapping Agency, ex Defense Map Agency) para desplegar el segmento de control del GPS. A continuación se agrega un mapa actualizado del mismo.
 |
|
|
Por un camino separado e independiente, el Servicio
Internacional de Rotación de la
Tierra y Sistemas de Referencia (IERS) establecía hacia fines
de la década del 80 el Sistema de Referencia Terrestre Internacional (ITRS)
para aplicaciones de alta precisión como la geodinámica, el estudio de las
variaciones del nivel del mar, y otros fenómenos que afectan la corteza
terrestre. En el año 1988 el IERS produce su primera realización del ITRS
conocida como Marco de Referencia Terrestre Internacional o, más brevemente,
ITRF. Posteriormente, se consolida una estructura de
coordinación y mantenimiento del referido marco a través del Servicio GNSS Internacional a comienzos de la década del 90.
Es así que el ITRF surge como un verdadero paradigma de la Geodesia Global en el que
colaboran para su desarrollo y mantenimiento físico y matemático, una gran
cantidad de instituciones de la comunidad científica internacional. En la realización del ITRF se
utiliza una combinación de varias técnicas geodésicas espaciales, por ejemplo
para determinar el origen del marco se utiliza el sistema SLR, por el cual se
miden distancias láser a satélites específicos, en tanto que para determinar la
escala se combinan los resultados del SLR y el VLBI, siendo este último un
sistema de medición de radiofuentes extragalácticas por medio de
radiotelescopios. Adicionalmente a dichas técnicas hay que agregar los
conocidos Sistema de Posicionamiento Global GPS y su equivalente ruso GLONASS,
y DORIS que es un sistema por el cual se mide la variación de distancias desde
satélites específicos a balizas orbitográficas.
Como
mencionamos en otro artículo, recordamos a los lectores que ITRF incorpora el
concepto de la cuarta coordenada: el tiempo. En efecto, ITRF es
un marco dinámico y cambia de acuerdo a las variaciones temporales de las coordenadas de la red y sus velocidades debido a los efectos del movimiento de las placas
tectónicas, movimiento del polo y otros fenómenos geofísicos como los
originados por los terremotos y la actividad volcánica. Este es el motivo
principal por el cual ITRF tiene asociada una época de definición, es decir que
los valores de coordenadas publicados son válidos para un momento específico de
tiempo. Es por ello que existen a la fecha las siguientes realizaciones o
versiones, a las que se les adiciona un código de año para identificarlos: ITRF 88, ITRF89, ITRF90, ITRF91, ITRF92, ITRF93, ITRF94, ITRF96, ITRF97, ITRF2000, ITRF2005 e ITRF2008. Por
ejemplo, el ITRF2005 constituye una realización del ITRS al 1 de enero de 2005.
Cada solución del ITRF está presentada al usuario como un catálogo de
coordenadas X, Y, Z (en metros) y de velocidades dX, dY, dZ (en metros por
año), junto a una estimación de los errores para cada componente de las
coordenadas.
El ITRF es fundamental por varias razones: la primera es que
se trata, ni más ni menos, de la capa de referencia más básica para los datos
espaciales del planeta Tierra; la segunda es porque -como veremos- su red es lo
suficientemente densa como para establecer y desarrollar marcos a escala
regional y nacional; y tercero porque este marco es un estándar global para
todas las actividades que requieren datos de posición.
A esta altura, cabe señalar que para una gran cantidad de aplicaciones prácticas que incluyen a la cartografía, el catastro y los sistemas de información geográfica, resulta suficiente disponer de un marco con coordenadas fijas. Aquí cabe aclarar que cuando decimos fijas no estamos diciendo coordenadas inmovilizadas para siempre. No obstante ello, lo que en cualquier caso no debe perderse de vista es seguir la máxima de medir tan preciso como sea necesario y no tan preciso como sea posible. Es que la referida necesidad debe estar a tono con la adecuación al uso pretendido.
A esta altura, cabe señalar que para una gran cantidad de aplicaciones prácticas que incluyen a la cartografía, el catastro y los sistemas de información geográfica, resulta suficiente disponer de un marco con coordenadas fijas. Aquí cabe aclarar que cuando decimos fijas no estamos diciendo coordenadas inmovilizadas para siempre. No obstante ello, lo que en cualquier caso no debe perderse de vista es seguir la máxima de medir tan preciso como sea necesario y no tan preciso como sea posible. Es que la referida necesidad debe estar a tono con la adecuación al uso pretendido.
A diferencia de WGS 84, ITRF
dispone de una red suficientemente densa de estaciones a nivel mundial que
facilita el acceso al marco de referencia por parte de los usuarios, en la
siguiente figura se muestra por hemisferio y por técnica las estaciones que
integran la red ITRF2008.
 |
|
Red ITRF 08. Fuente: Altamimi, Z. (2010).
|
ITRF constituye entonces la red de orden 0 a partir de la cual tienen
lugar una sucesión de densificaciones que se realizan básicamente en dos niveles:
el primero corresponde a las redes regionales como SIRGAS, y el segundo a las
redes nacionales como POSGAR2007. Por ejemplo, esta última red está vinculada a
SIRGAS y a través de ésta al marco ITRF05, época 2006.632.
Es decir que cada uno de los niveles toma como puntos
fiduciales los de orden superior que dan origen a las redes de orden inferior a
efectos de disponer de datos de posición homogéneos y consistentes en todo el
planeta. Más allá de las diferencias entre las realizaciones del ITRF (yy)
utilizadas y la época de definición en que están expresadas las coordenadas,
prácticamente la totalidad de los países de nuestra región ya disponen de un
marco de referencia materializado en base al ITRF. Sobre este particular y de
manera ilustrativa, los interesados pueden consultar la sección sobre Redes
Nacionales en la página de SIRGAS www.sirgas.org
Volviendo
al WGS 84, y tomando en consideración lo ya apuntado respecto a que ITRF es el
estándar global en materia de datos de posición, la National Geospatial-Intelligence Agency (NGA) ha venido realizando una
serie de refinamientos tendientes a alinear WGS 84 con IRTF. Estas
realizaciones son marcos que permiten calcular las posiciones orbitales
transmitidas (a través del mensaje de navegación difundido por la señal GPS) y
precisas, utilizando las coordenadas
re-ajustadas de la red de estaciones de control y monitoreo del sistema GPS. Las
diferentes versiones de WGS84 indican con la letra G el uso de observaciones
GPS más el número de semana GPS correspondiente a cada nueva realización. Tenemos
así definidos los siguientes marcos de referencia:
- WGS84 (G730) que muestra un acuerdo con ITRF92 en un nivel de aproximación de 10 cm.
- WGS84 (G873) que reveló diferencias sistemáticas respecto al ITRF 94 no mayores a 2 cm.
-
WGS84 (G1150) que fue alineado con ITRF2000 época 1997.0, muestra una diferencia en error medio cuadrático de un centímetro por componente. Para esta realización se han empleado un conjunto de 49 estaciones del IGS como puntos fijos en la solución del marco de referencia.
- WGS 84 (G1674) alineado con ITRF2008 con la misma época 2005.0.
Todo ello no hace más que demostrar el continuo
esfuerzo en perfeccionar y monitorear la estabilidad del marco WGS 84. Podemos
decir entonces que hablar de WGS 84 es equivalente a hacer referencia al ITRF, ya
que en la práctica constituyen dos marcos completamente integrados y compatibles.
Fuentes:
Altamimi, Zuheir (2010). “ITRF2008 and the
IGS Contribution”. IGS Workshop 2010, Newcastle, UK,
http://acc.igs.org/trf/igs-in-itrf2008_IGSW10.pdf
Instituto Geográfico Nacional (IGN) (2013), http://www.ign.gob.ar/AreaProfesional/Geodesia/posgar07
NIMA
Technical Report TR8350.2, "Department of Defense World Geodetic System
1984, Its Definition and Relationships With Local Geodetic Systems", Third
Edition, http://earth-info.nga.mil/GandG/publications/tr8350.2/wgs84fin.pdf
Addendum to NIMA TR 8350.2: "Implementation of the World Geodetic System
1984 (WGS 84) Reference Frame G1150",
Oficina de las Naciones Unidas para Asuntos del Espacio Ultraterrestre
(2013). Plantilla informativa sobre WGS 84, http://www.oosa.unvienna.org/pdf/icg/2012/template/WGS_84.pdf
Consideramos que es equivocado el concepto de que los ITRF cambian. Justamente me parece que es lo contrario. Los IRTF no cambian y por eso pueden detectar los movimientos de as placas en el tiempo, lo que hace surgir la necesidad de determinar la velocidad a la que se mueve la placa para poder comparar las coordenadas que de otro modo jamas darian los mismo.
ResponderEliminarLas distintas soluciones ITRF lo que muestran es la evolución tanto en la cantidad como en la calidad de los datos considerados para obtener las distintas soluciones. Desde luego que al mejorarse la resolución de las distintas soluciones, se debe interpretar como que hay un cambio principalmente en la ubicación del origen de la solución con respecto al centro de masa de la Tierra.
Eliminar
ResponderEliminarEstoy de acuerdo con usted
no entendi un sorongo
ResponderEliminar